The concept of vehicles that can drive themselves has long been a dream for both robotics researchers and the automotive industry. While significant progress has been made in this field, the deployment of autonomous vehicles is still limited to certain environments. Recently, researchers have been focusing on the development of automated valet parking (AVP) systems, which would enable cars to find parking spots on their own. However, the reliable realization of this technology has presented challenges.
A team of researchers at Mach Drive in Shanghai has made significant strides in this area with the development of the Openspace Collision-freE trAjectory plaNner (OCEAN). This trajectory planner, introduced in a pre-published paper on arXiv, has shown remarkable capabilities in enhancing the safe navigation of vehicles to parking spots without colliding with obstacles. The researchers, led by Dongxu Wang and Yanbin Lu, describe OCEAN as an optimization-based trajectory planner that utilizes the Alternating Direction Method of Multiplier (ADMM) for accelerated computation.
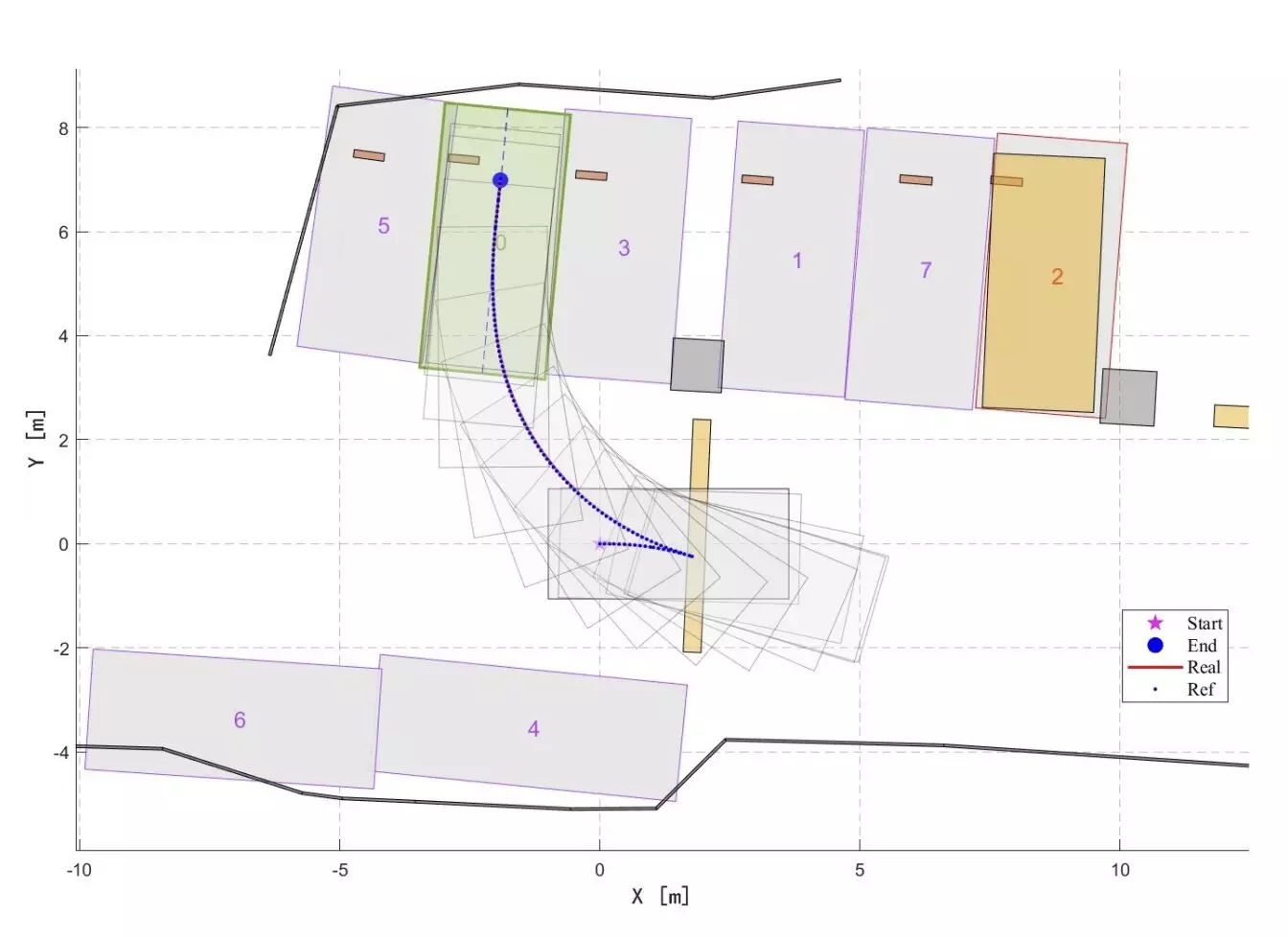
One of the key advantages of the OCEAN planner is its ability to address the shortcomings of previous approaches to autonomous parking. These include inaccurate collision prediction and poor real-time performance. By building upon the Hybrid Optimization-based Collision Avoidance (H-OBCA) framework, the OCEAN planner significantly improves collision avoidance, robustness, and computational speed. The researchers describe a process where the trajectory planning problem is first initiated with a collision-free Hybrid A* trajectory, followed by an efficient collision avoidance trajectory planning employing ADMM.
Extensive testing of the OCEAN planner in simulated scenarios and real-world parking environments has yielded highly promising results. The planner outperformed various benchmarks in autonomous parking applications, demonstrating superior system performance and real-time processing capabilities. This breakthrough could pave the way for the implementation of large-scale parking planners on low-power computing platforms, enabling widespread adoption of automated vehicle parking technologies.
While the OCEAN planner shows great potential, further enhancements and real-world testing are needed to fully validate its capabilities. Automotive companies may consider incorporating this technology into their vehicles, bringing us closer to a future where autonomous vehicle parking becomes a standard feature. The relentless efforts of researchers like Wang, Lu, and their team signify a step forward in revolutionizing the way we interact with and navigate our vehicles. The future of autonomous vehicle parking looks promising with the innovative OCEAN planner at the forefront.
Leave a Reply