Since the inception of robotics nearly seventy years ago, engineers and researchers have largely relied on motor-driven technologies to power their creations. Whether in industrial settings or experimental designs, these mechanical marvels have often shared a common limitation: reliance on motors that have existed for over two centuries. Despite significant advancements in software and control systems, many robots have remained rigid and inefficient, lacking the agility and flexibility inherent in living beings. With innovations like muscle-powered robotic legs emerging from prestigious research institutions, the landscape of robotics is now poised for a transformative leap towards efficiency and versatility.
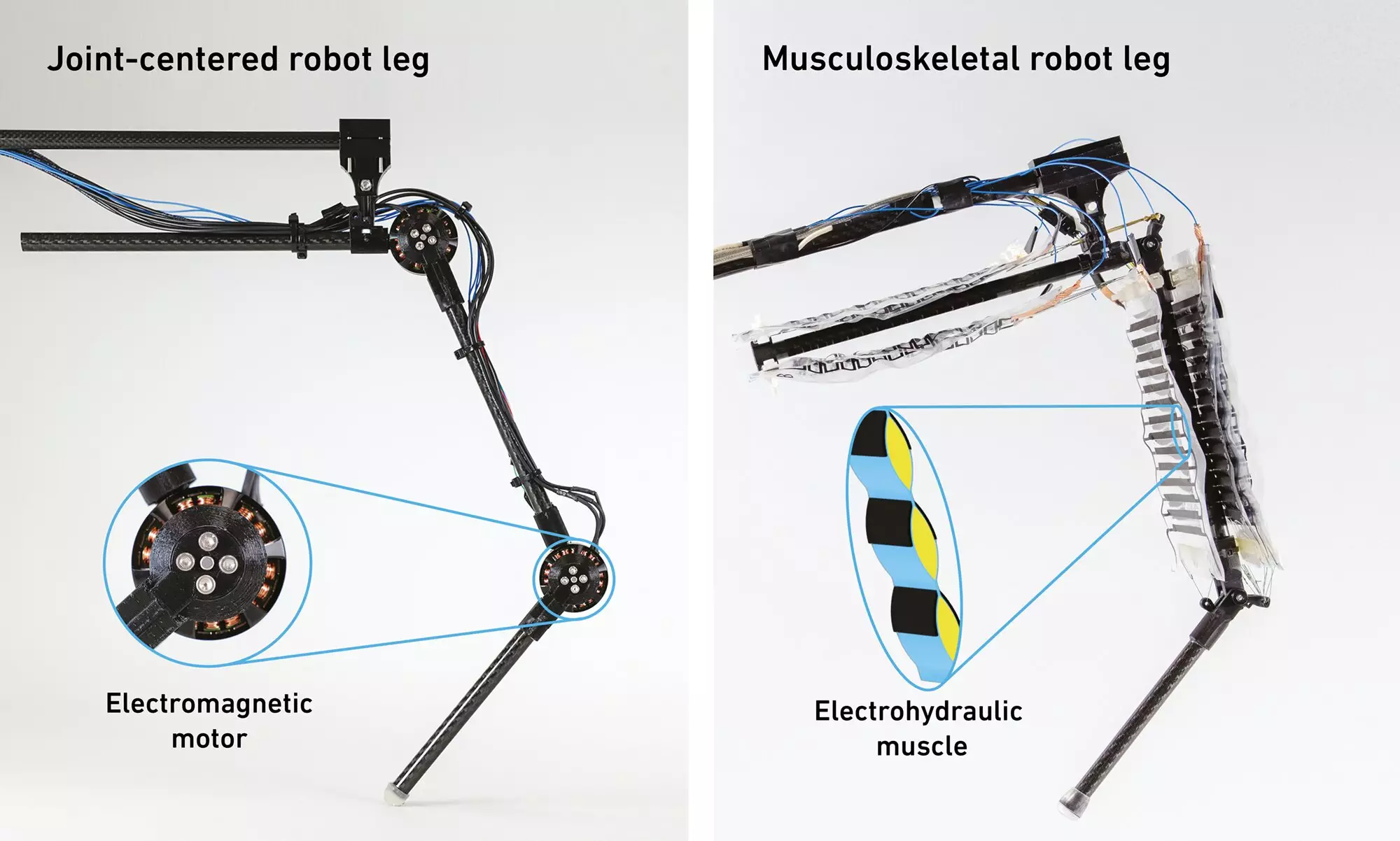
At the forefront of this robotic revolution are researchers from ETH Zurich and the Max Planck Institute for Intelligent Systems (MPI-IS), collaborating through the Max Planck ETH Center for Learning Systems (CLS). Led by Robert Katzschmann and Christoph Keplinger, their team has pioneered an animal-inspired musculoskeletal robotic leg that challenges the status quo. Unlike traditional robotic appendages powered by electric motors, this new design employs electro-hydraulic actuators, referred to as HASELs (Hydraulically Amplified Self-healing Electrostatic Actuators). These actuators mimic muscular functionality, allowing successions of contractions and extensions akin to human and animal motion.
The innovative mechanism behind HASELs uses oil-filled plastic bags that react to electrical input. This system’s operational core hinges on creating electrostatic attraction between electrodes when a voltage is applied, leading to movement that promotes both flexibility and strength. This foundational shift from conventional methods suggests a future path where robotics can exist in a state of dynamic adaptability, replicating the behaviors of living organisms with implications that extend far beyond mere efficiency.
The performance metrics of these new robotic systems can be illustrated by a notable disparity in energy consumption compared to traditional electric-motor-driven designs. In their trials, the researchers discovered a pronounced increase in the energy efficiency of the muscle-powered leg. Buchner’s insights into thermal management illuminate a pivotal advantage: while electric motors generate excessive heat—often necessitating cooling systems—the electro-hydraulic leg remarkably maintains a stable temperature during operation. This durability not only saves energy but also minimizes additional mechanic constraints, such as sizeable heat sinks or cooling fans, commonly required for traditional models.
As the new leg demonstrates the ability to perform high jumps and quick movements while effectively navigating obstacles, the disparity in responsiveness becomes even clearer. Unlike conventional robots that rely on complex sensor systems to gauge movement angles, the artificial muscle system adapts to environmental conditions through dual input signals. This paradigm shift empowers the robotic leg to modify its joint position instinctively, echoing human-like adaptability in varying terrains.
Understanding the importance of agility in robotics introduces new possibilities in sectors requiring precision and adaptability, such as manufacturing, healthcare, and even space exploration. The implications of deploying muscle-powered systems span various applications, particularly in contexts where dynamic interaction is vital. Katzschmann highlights this potential by likening the functionality of robotic legs to the natural flexibility humans exhibit while maneuvering through unpredictable landscapes, from navigating stairs to traversing rocky trails.
Despite its groundbreaking design, one cannot overlook the system’s limitations. The current model remains tethered and lacks independent mobility—a crucial element for developing robots capable of performing complex tasks autonomously. Yet, as research continues, overcoming these constraints appears increasingly probable. Advancements in machine learning and control systems can be integrated into this new hardware paradigm, paving the way for next-generation robotics that genuinely bridge the gap between man-made machines and living organisms.
The emergence of muscle-powered robotics heralds a new chapter in the development of intelligent machines. By shifting towards more biologically inspired designs, researchers are unlocking unprecedented levels of adaptability and efficiency. This pioneering work by the team at CLS represents not just a technological achievement, but a fundamental rethinking of what robots could be. As research progresses, it will undoubtedly lay the groundwork for an exciting era where robots blend seamlessly into complex environments, enhancing both our capabilities and experiences in myriad ways. The journey has just begun, and the future is rife with possibilities for innovation and exploration in robotic technology.
Leave a Reply