A team of roboticists from Technical University of Munich and Sun Yat-sen University in Germany and China, respectively, have made significant improvements to the agility of quadruped robots. By adding a flexible spine and tail, the researchers have created a more refined robot that demonstrates enhanced mobility. The study was recently published in the journal Science Robotics.
Unlike most four-legged robots used in business or military applications which have stiff backs, the researchers decided to incorporate a flexible spine into their robot design. They recognized the importance of mimicking the flexibility found in virtually every four-legged animal. Although building quadruped robots with flexible spines was known to improve nimbleness, the complexity involved seemed to outweigh the benefits. However, this new study suggests that a flexible spine can actually simplify leg design and generate a more fluid walking motion.
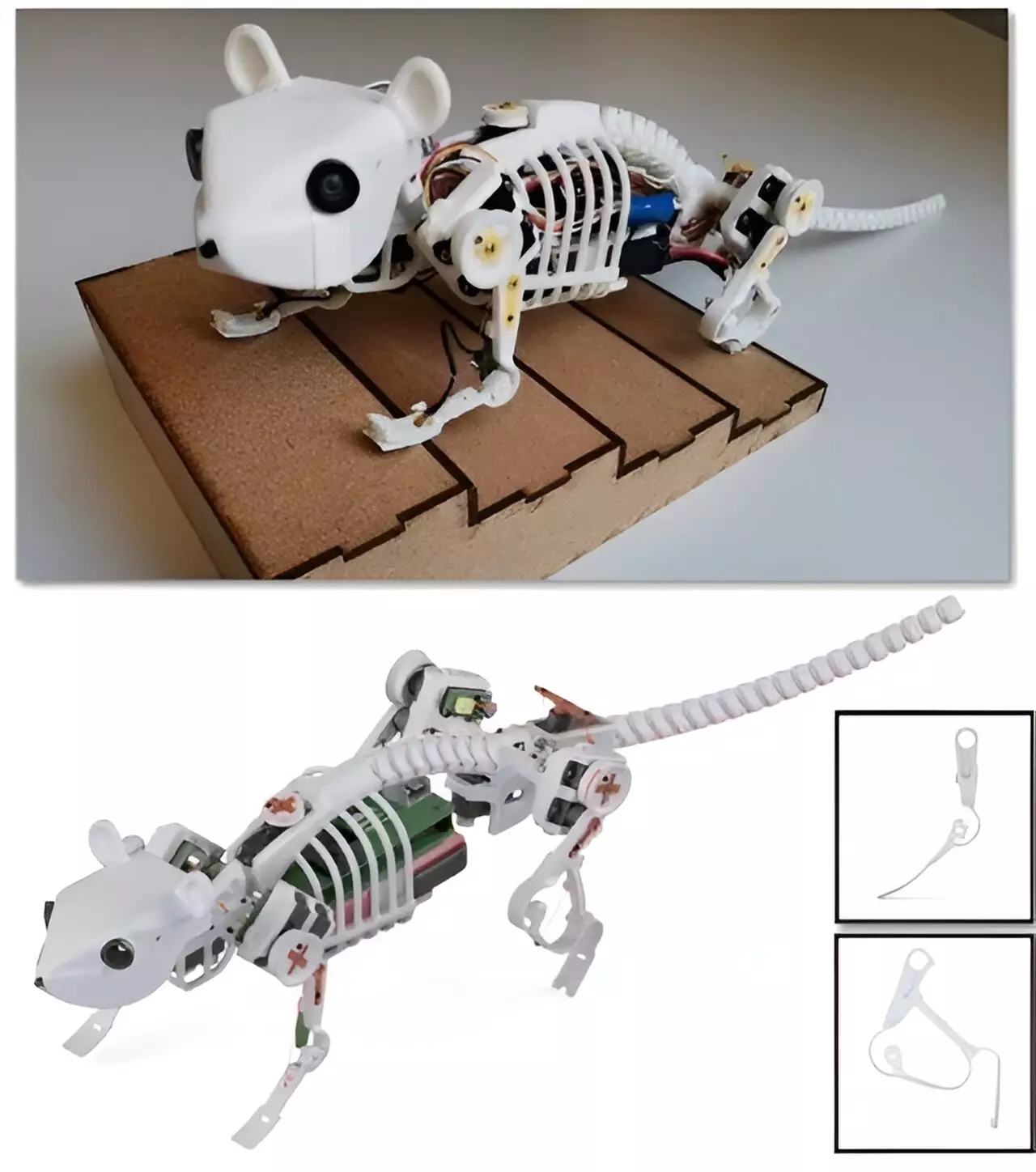
The robot developed by the team closely resembles a mouse, with a plastic head accurately modeled after one. Its appearance, though, is more reminiscent of an animated skeleton. The robot’s spine consists of segmented plastic bones, imitating the design of a real mouse spine, complemented by plastic ribs and a segmented tail. Notably, the legs and paws deviate from the animal’s anatomy and instead feature prosthetic-like springiness, similar to those worn by human amputees. The electronic components and mechanisms that power the robot are visible through the transparent rib structure, utilizing a tendon-pulley system that eliminates the need for conventional musculature.
To evaluate the robot’s performance, the researchers conducted four exercises: walking, balancing, turning, and maze navigation. Each exercise was performed twice, once with the flexible spine and tail system active, and once with it turned off. The results demonstrated a clear advantage with the system activated. In particular, when navigating the maze, the robot completed the course an average of 30% faster compared to when the system was deactivated.
The findings of this study have significant implications for the development of quadruped robots. By embracing the concept of a flexible spine and tail, researchers now have a clearer path to increasing the agility and efficiency of these machines. This advancement could be particularly valuable in scenarios requiring quick movements and navigation in challenging environments.
Moving forward, further refinements and optimizations can be expected to enhance the performance of quadruped robots. The incorporation of additional features, such as advanced sensory systems and improved artificial intelligence, may further elevate their capabilities. As these technologies continue to evolve, quadruped robots could find applications in various fields, including search and rescue operations, exploration missions, and even household assistance.
The introduction of a flexible spine and tail to a quadruped robot by a team of roboticists has unveiled exciting possibilities in terms of mobility and agility. Through a series of tests, the researchers demonstrated the superior performance of the robot with the system enabled, specifically in maze navigation where it outperformed the system in the deactivated state. This breakthrough sets the stage for future advancements in quadruped robots and opens up new avenues for their utilization in a variety of industries and sectors.
Leave a Reply