Robotic systems have been making significant strides in various indoor environments, assisting humans with manual tasks and simple queries. However, the future of robotics lies in their deployment in unknown and unmapped environments, where obstacles can hinder their sensors and increase the risk of collisions. In particular, air-ground robots are poised to revolutionize outdoor navigation and tackle complex tasks that were once thought to be impossible.
Researchers at the University of Hong Kong have recently introduced a groundbreaking framework called AGRNav, aimed at enhancing the autonomous navigation of air-ground robots in occlusion-prone environments. This framework, outlined in a paper published on the arXiv preprint server, has shown promising results in both simulations and real-world experiments. The primary goal of this research was to develop a computational approach that would enable air-ground robots to navigate effectively in environments where some parts are likely to be occluded by various obstacles.
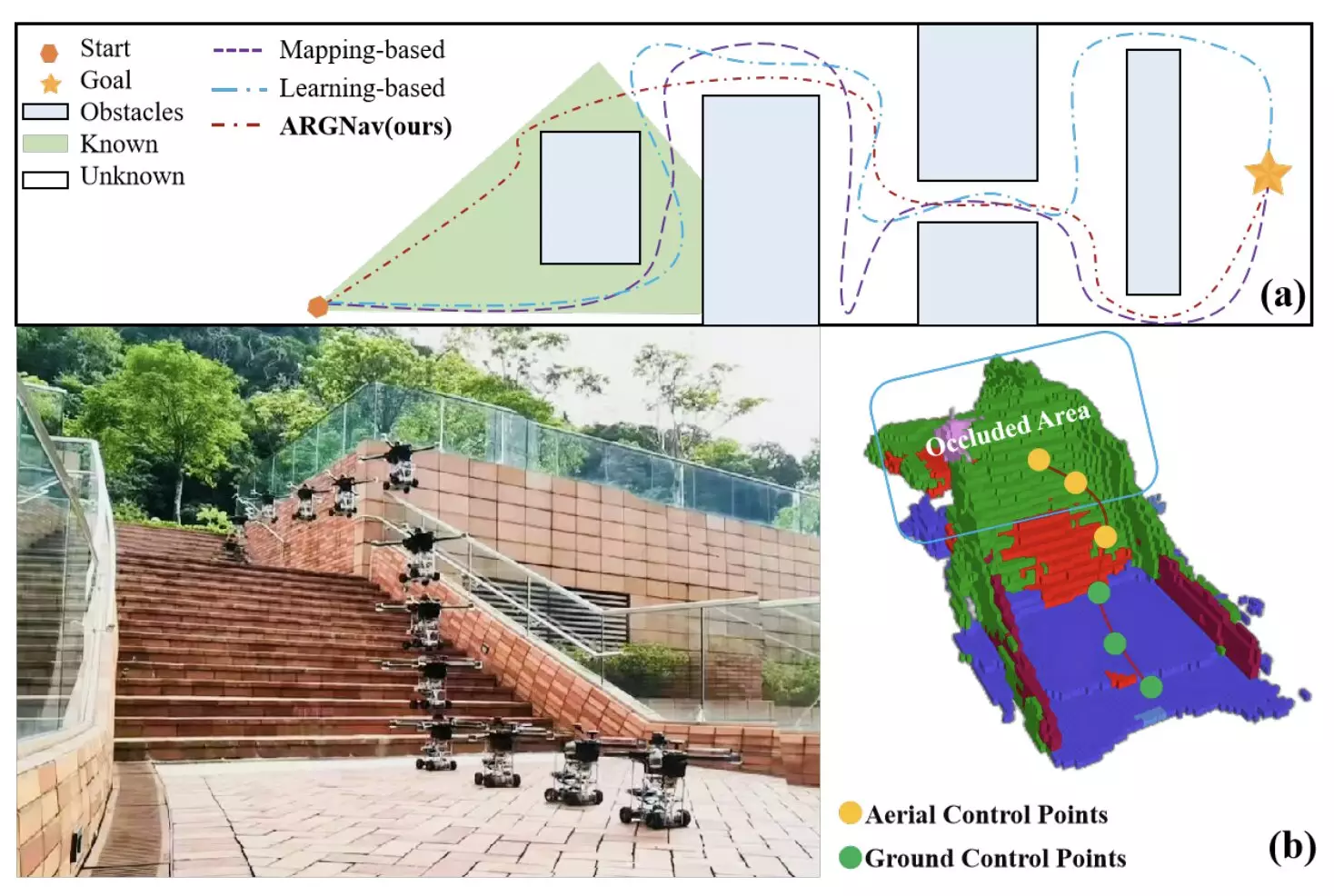
AGRNav comprises two main components: a lightweight semantic scene completion network (SCONet) and a hierarchical path planner. The SCONet utilizes a deep learning approach to predict the distribution of obstacles and their semantic features in the environment. This prediction is crucial for planning optimal aerial and ground paths for the robot to reach its destination. The hierarchical path planner uses the information provided by SCONet to generate energy-efficient paths for the robot’s navigation.
Evaluating the Framework
The researchers conducted evaluations of the AGRNav framework in both simulated and real-world environments, utilizing a custom air-ground robot for testing. The results were highly promising, as AGRNav outperformed all baseline and state-of-the-art navigation frameworks, providing optimal and energy-efficient paths for the robot. Additionally, the code underlying AGRNav is open-source and available on GitHub, allowing developers worldwide to access and utilize it for their own projects.
Future Deployments and Applications
Looking ahead, AGRNav has the potential to be deployed and tested on various air-ground robotic platforms, paving the way for effective navigation in real-world environments. The versatility and efficiency of AGRNav make it a powerful tool for tasks such as search and rescue missions after natural disasters, package delivery to remote locations, environmental monitoring, and more. By harnessing the capabilities of air-ground robots, we can unlock a new realm of possibilities for navigating complex outdoor settings.
The development of AGRNav represents a significant advancement in the field of robotics, particularly in the realm of air-ground navigation. By addressing the challenges of occluded environments and unknown obstacles, this framework opens up new possibilities for the deployment of robotic systems in a wide range of applications. With further testing and refinement, AGRNav could shape the future of air-ground robotics, transforming how we navigate and interact with the world around us.
Leave a Reply